
我把4点相关函数的计算方法做成了一个幻灯片。
Tag Archives: particle tracking
Rice分布的数值计算
我在极坐标下的二维无规行走中讨论到Rice分布:
(1) 
当无规行走发生的“位置”( )离原点很远时,值很大,而分布的极值也大至处于
)离原点很远时,值很大,而分布的极值也大至处于 处,因此,能看到分布主要特征的
处,因此,能看到分布主要特征的 范围也在附近。这时,式(1)中的第一类修正贝塞尔函数
范围也在附近。这时,式(1)中的第一类修正贝塞尔函数 的值会很大,而自然指数项
的值会很大,而自然指数项 会很小,但整个式(1)的值仍然是适中的。在MATLAB输入上式计算时,会因为计算过程中涉及到很大的和很小的值,所以尽管最终结果的值是适中的,计算也会溢出。这时可以利用第一类修正贝塞尔函数的渐近展开。当
会很小,但整个式(1)的值仍然是适中的。在MATLAB输入上式计算时,会因为计算过程中涉及到很大的和很小的值,所以尽管最终结果的值是适中的,计算也会溢出。这时可以利用第一类修正贝塞尔函数的渐近展开。当 为定值、
为定值、 很大且
很大且 时,
时,
(2) ![\begin{equation*} \begin{aligned} I_\alpha\left(z\right)&=\frac{\exp\left(z\right)}{\sqrt{2\pi z}}\left[1-\frac{4\alpha^2-1}{8z}-\frac{\left(4\alpha^2-1\right)\left(4\alpha^2-9\right)}{2!\left(8z\right)^2}\right.\\ &\left.-\frac{\left(4\alpha^2-1\right)\left(4\alpha^2-9\right)\left(4\alpha^2-25\right)}{3!\left(8z\right)^3}+\cdots\right]\\ &\approx\frac{\exp\left(z\right)}{\sqrt{2\pi z}}\left[1+O\left(z^{-1}\right)\right] \end{aligned} \end{equation*}](https://mlnbqvqmzkw4.i.optimole.com/w:334/h:132/q:mauto/f:best/https://www.andrewsun.net/panta_rhei/wp-content/ql-cache/quicklatex.com-6b8b0cd804f2189d212149e2cc9fe98a_l3.png "Rendered by QuickLaTeX.com")
 越大,级数会衰减得越快.如果足够大,
越大,级数会衰减得越快.如果足够大, 可近似为
可近似为 。这个近似式并不改变很大的事实。但如果将式(2)代入式(1),
。这个近似式并不改变很大的事实。但如果将式(2)代入式(1),
(3) ![\begin{equation*} p_R\left(r\right)=\frac{r\exp\left[-\frac{\left(r-\mu_r\right)^2}{2\sigma^2}\right]}{\sqrt{2\pi r\mu_r\sigma^2}}\left[1+\frac{\sigma^2}{8r\mu_r}-\frac{9\sigma^4}{128r^2\mu_r^2}+\cdots\right] \end{equation*}](https://mlnbqvqmzkw4.i.optimole.com/w:344/h:50/q:mauto/f:best/https://www.andrewsun.net/panta_rhei/wp-content/ql-cache/quicklatex.com-0e7cf035122d00b27fecc1e2fb9da486_l3.png "Rendered by QuickLaTeX.com")
可见,无论多大, 其实只跟与之差有关。式(3)只需要计算
其实只跟与之差有关。式(3)只需要计算![\exp\left[-\left(r-\mu_r\right)^2\right]](https://mlnbqvqmzkw4.i.optimole.com/w:106/h:27/q:mauto/f:best/https://www.andrewsun.net/panta_rhei/wp-content/ql-cache/quicklatex.com-8e098bdeb3edf15a55d3e1ac6ed8f887_l3.png "Rendered by QuickLaTeX.com") 。由于Rice分布的范围主要在附近,因此与之差是很小的,因此这一计算不会溢出。
。由于Rice分布的范围主要在附近,因此与之差是很小的,因此这一计算不会溢出。
实际计算时,可先判断和 的取值是否使式(1)的计算溢出了,若溢出,按式(3)计算时,可根据和的取值大小决定舍去级数的哪些尾项。按照MATLAB的计算极限,能让式(1)溢出的情况,也就必然能使式(3)的所有尾项都舍去了。
的取值是否使式(1)的计算溢出了,若溢出,按式(3)计算时,可根据和的取值大小决定舍去级数的哪些尾项。按照MATLAB的计算极限,能让式(1)溢出的情况,也就必然能使式(3)的所有尾项都舍去了。
极坐标下的二维无规行走
这几天我在李俊杰、Mathematica的帮助下推导了极坐标下的二维布朗运动的统计。一开始我就觉得,这是很基本的问题,应该会有相应的例题或课件直接给出答案。但是一开始搜都搜不到。我用体育老师教的数学推了半天,出结果之后,就立马搜到资料了。只当作上天逼我练习一下大学的数学吧。
我要考虑的问题是二维无规行走的极坐标的统计,即极径和极角的分布。之前我总结过了二维和三维无规行走的极径分布分别是Rayleigh分布和Maxwell分布,这都是直角坐标的期望值为零的情况。本文一是要考虑期望值不为零的情况,二是不光考虑极径的分布,还要考虑极角的。
二维无规行走的“轨迹中心”
一个走了N步的二维无规行走轨迹应该是有其中心的。例如,可以定义这个中心为无规行走的x坐标和y坐标的期望值 和
和 。这样的定义严格来说并不实用,因为对于给定的有限步数的轨迹,我们无法知道期望值,只能计算均值。后者只有
。这样的定义严格来说并不实用,因为对于给定的有限步数的轨迹,我们无法知道期望值,只能计算均值。后者只有 时才是期望值。为了实验方便,我定义二维无规行走的轨迹“中心”是其起始坐标
时才是期望值。为了实验方便,我定义二维无规行走的轨迹“中心”是其起始坐标 。这样,不仅对任意一个给定的轨迹都能直接说出其“中心”,还能主动实现一个给定中心的“无规行走”——只要从你的行走是从那个中心开始的就行。凭直观想象,一个从点出发的无规行走,只要步数
。这样,不仅对任意一个给定的轨迹都能直接说出其“中心”,还能主动实现一个给定中心的“无规行走”——只要从你的行走是从那个中心开始的就行。凭直观想象,一个从点出发的无规行走,只要步数 足够大,就有
足够大,就有 和
和 。当然,这是为了实验的思考。接下来的推导都是谈期望值
。当然,这是为了实验的思考。接下来的推导都是谈期望值
期望值为零的情况
首先,考虑一个“在原点处”的无规行走,即其x坐标和y坐标的期望值 ,方差都是(各向同性)。这时其极坐标的极径和极角和
,方差都是(各向同性)。这时其极坐标的极径和极角和 的分布分别为一个Rayleigh分布和一个均匀分布:
的分布分别为一个Rayleigh分布和一个均匀分布:
(1) ![\begin{equation*} p_R\left(r\right)=\frac{r}{\sigma^2}\exp\left[-\frac{r^2}{2\sigma^2}\right] \end{equation*}](https://mlnbqvqmzkw4.i.optimole.com/w:152/h:36/q:mauto/f:best/https://www.andrewsun.net/panta_rhei/wp-content/ql-cache/quicklatex.com-7c7a1aaa869c3b54cad4199ba84a57dc_l3.png "Rendered by QuickLaTeX.com")
(2) 
期望值不为零的情况
考虑“位于极坐标中点 处的无规行走,即其直角坐标x和y的期望值为
处的无规行走,即其直角坐标x和y的期望值为 ,方差都是(各向同性)。于是
,方差都是(各向同性)。于是
(3) 
则极径和极角的联合分布为
(4) ![\begin{equation*} p_{R\Theta}\left(r,\theta\right)=\frac{r}{2\pi\sigma^2}\exp\left[-\frac{r^2+\mu_r^2-2r\mu_r\cos\left(\theta-\mu_\theta\right)}{2\sigma^2}\right] \end{equation*}](https://mlnbqvqmzkw4.i.optimole.com/w:336/h:36/q:mauto/f:best/https://www.andrewsun.net/panta_rhei/wp-content/ql-cache/quicklatex.com-63702647c17e938839b13ce07cfba0e2_l3.png "Rendered by QuickLaTeX.com")
由于无规行走的极径和极角是相互独立的随机量,所以求两个边缘分布就可以了。
(5) 
这两个积分都无法用初等函数表示。我是用Mathematica来算的,结果如下:
(6) 
(7) ![\begin{equation*} \begin{aligned} p_\Theta\left(\theta\right)=&\frac{1}{\sqrt{8\pi\sigma^2}}\mu_r\cos\left(\theta-\mu_\theta\right)\exp\left[-\frac{\mu_r^2\sin^2\left(\theta-\mu_\theta\right)}{2\sigma^2}\right]\times \\ &\left[\mathrm{erf}}\left(\frac{\mu_r\cos\left(\theta-\mu_\theta\right)}{\sqrt{2\sigma^2}}\right)+1\right]+\frac{1}{2\pi}\exp\left(-\frac{\mu_r^2}{2\sigma^2}\right) \end{aligned} \end{equation*}](https://mlnbqvqmzkw4.i.optimole.com/w:356/h:79/q:mauto/f:best/https://www.andrewsun.net/panta_rhei/wp-content/ql-cache/quicklatex.com-70a4b471c6811a529bc574edc87aedfc_l3.png "Rendered by QuickLaTeX.com")
其中, 是零阶第一类Bessel函数
是零阶第一类Bessel函数
(8) 
 是误差函数
是误差函数
(9) 
式(6)其实就是Rice分布,当 时退化为Rayleigh分布(式(1))。下图是固定
时退化为Rayleigh分布(式(1))。下图是固定 ,
, 的分布曲线:
的分布曲线:
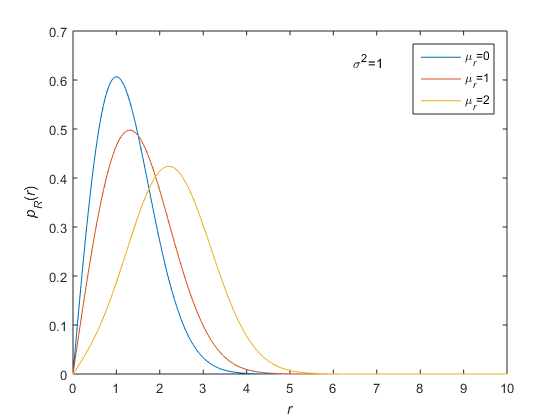
Rice distributions of varying expectations
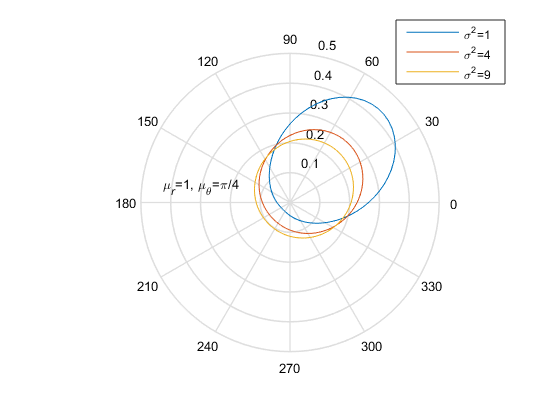
下图是固定 ,
, 的分布曲线:
的分布曲线:
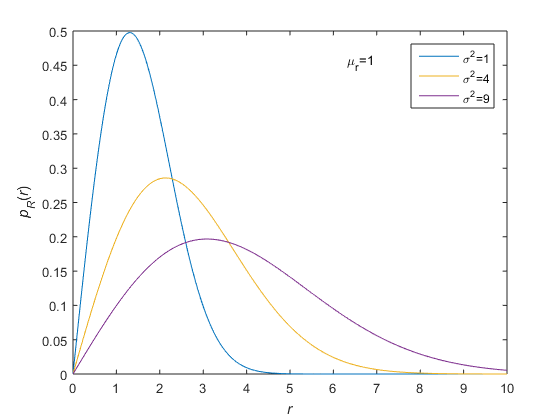
Rice distributions of varying variances
作为极径的分布,Rice分布与极角的期望 无关。而极角的分布(式(7))与和都有关。这个分布是否已有人名,我没有找到。我只找到一篇文章讨论更加一般的情况,即两组高斯量X和Y期望值
无关。而极角的分布(式(7))与和都有关。这个分布是否已有人名,我没有找到。我只找到一篇文章讨论更加一般的情况,即两组高斯量X和Y期望值 ,且它们的方差也各不相等
,且它们的方差也各不相等 ;而且X坐标和Y坐标还是相关的,它们的协方差系数
;而且X坐标和Y坐标还是相关的,它们的协方差系数 的情况[1]。我是算出式(7)之后才找到这篇论文的,唯一安慰就是一对照发现我好歹算对了。
的情况[1]。我是算出式(7)之后才找到这篇论文的,唯一安慰就是一对照发现我好歹算对了。
式(7)在时退化为均一分布 (式(2)),这是“在原点处”的无规行走的结果。可以想象,一个远离原点处的二维无规行走,其轨迹相对原点的极角涨落基本会分布在一个很窄的范围之内,而且这个范围主要依赖这个无规行走的“位置”。下图是固定和,
(式(2)),这是“在原点处”的无规行走的结果。可以想象,一个远离原点处的二维无规行走,其轨迹相对原点的极角涨落基本会分布在一个很窄的范围之内,而且这个范围主要依赖这个无规行走的“位置”。下图是固定和, 的结果:
的结果:
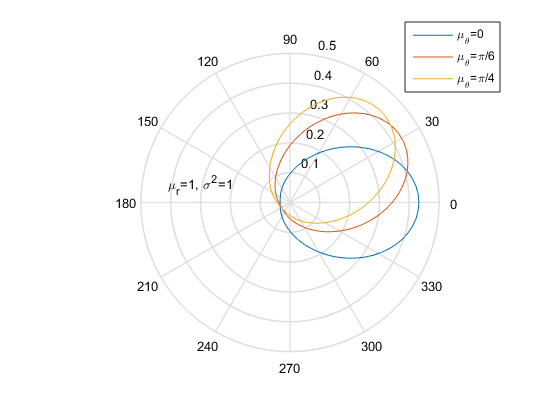
Polar angle distributions of random walk: varying angular expectations
再仔细想,一个给定方差的无规行走,如果离原点近一些,其轨迹的极角涨落会宽一些。下图是固定 和,
和, 的结果:
的结果:
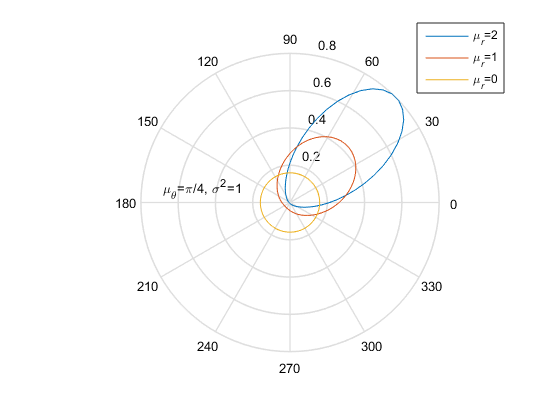
Polar angle distributions of random walk: varying radial expectations
最后,看一下固定和, 的结果:
的结果:
Polar angle distributions of random walk: varying variances
References
- P. Dharmawansa, N. Rajatheva, and C. Tellambura, "Envelope and phase distribution of two correlated gaussian variables", IEEE Transactions on Communications, vol. 57, pp. 915-921, 2009. http://dx.doi.org/10.1109/TCOMM.2009.04.070065